
Tackling the Complexities of Mixed Fleets in Autonomous Haulage
- Apr 28
- 6 min read
Autonomous haulage has reached an important milestone. Across the mining industry, large-scale deployments of fully autonomous fleets are now operating successfully in highly controlled environments. These projects demonstrate what is technically possible when autonomy is introduced from day one.
However, this is not the reality for most mining operations.
The majority of mines globally are brownfield sites — complex, evolving environments shaped by decades of investment. They operate with existing fleets, established infrastructure, and continuous production pressures. For these operations, autonomy cannot be introduced as a clean slate. It must be layered into an already active system.
This is where the challenge of mixed fleets begins, and where new approaches to autonomy built on interoperable, OEM-agnostic systems and real-world deployment experience are proving critical to scaling adoption.

What is a Mixed Fleet in Mining?
A mixed fleet is not defined by a single variable, but by diversity across multiple dimensions.
In mining, this typically includes:
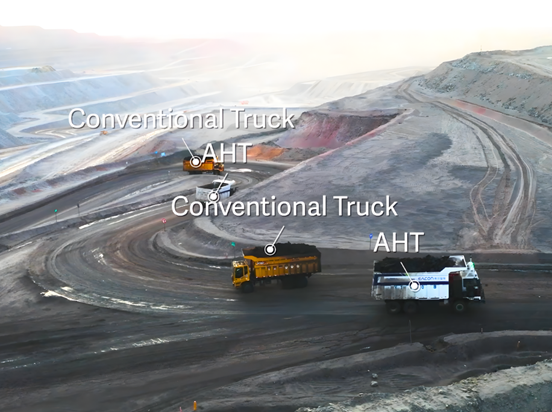
Autonomous and manually operated vehicles sharing the same haul roads, loading and dumping areas, or crusher zones
Trucks from multiple OEMs such as Caterpillar, Komatsu, and Liebherr
In many operations, the make-up of the haulage fleet varies across truck size, brand, model and even powertrain – a reflection of years of procurement and operational decisions.
Why Mixed Fleets Are Integral to the Industry
For many operations, mixed fleets are not a choice, they are the baseline.
Mining fleets are long-life assets, with haul trucks typically operating over 10 years. Many sites run equipment from multiple manufacturers, acquired at different points in time to meet evolving production needs. As a result, fleets often represent hundreds of millions of dollars in capital investment, much of which still holds significant operational value. Replacing these fleets to enable autonomy is often considered to be one of the larger hurdles to embracing autonomy.
Beyond capital considerations, the make-up of the fleet is also embodied in operational knowledge. Maintenance procedures, spare parts ecosystems, workforce training, and site-specific expertise are all built around existing equipment. Transitioning to autonomy must therefore account not just for hardware, but for the systems and people that support it.
As a result, most mines adopt a phased approach, introducing autonomy incrementally while maintaining ongoing production and managing operational risk. This has made flexibility, interoperability, and ease of integration defining requirements for modern autonomous haulage systems. This is particularly true in brownfield operations with existing fleets and infrastructure.

The Core Challenges of Mixed-Fleet Autonomy
Interoperability Between Autonomous Systems
One of the most critical challenges arises when multiple autonomous haulage systems operate in the same environment. For example, running one autonomy provider’s system alongside another AHS requires clearly defined standards for information sharing. This includes determining what data needs to be exchanged, in what format, and to what tolerances, ensuring that each system can interpret and respond to the other reliably. Without a standardised protocol, mismatches in timing, sensor interpretation, or decision-making could lead to inefficient interactions between autonomous fleets.
Traffic Management in Shared Operations
Even with a single autonomy system, designing an effective traffic management plan for mixed-fleet operations is complex. Mines must define how vehicles navigate shared haul roads, intersections, dumps, crushers, and loading zones while maintaining operational efficiency. This involves setting priorities, sequencing movements, and anticipating potential bottlenecks, all while balancing production targets with safety requirements. A robust traffic management plan is essential to ensure that the system functions cohesively, avoiding conflicts and maintaining consistent throughput across the operation.
Coordination with Manual Trucks
Introducing autonomous trucks into areas already served by manually operated vehicles adds a behavioural layer of complexity. Maintaining safe, consistent, and productive outcomes requires that autonomous vehicles anticipate human driver behaviour, enforce safe spacing and right-of-way, and adapt to deviations in speed or route. Mines must decide whether the objective is full integration (enabling manual and autonomous trucks to share not only haul roads but also dumps, crushers, and load units) or a more limited coexistence. The operational strategy chosen directly influences safety, efficiency, and overall productivity in mixed-fleet environments.
Enabling Mixed-Fleet Autonomy at Scale
Addressing these challenges of system interoperability, traffic management complexity, and coordination with manual trucks requires a layered approach combining advances in system architecture, fleet orchestration, and vehicle-level intelligence.
Open Architecture and Standardised System Integration
Addressing interoperability between autonomous systems begins at the architectural level. When multiple AHS platforms operate in the same environment, a shared framework for data exchange is essential. This means agreeing on what information is communicated between systems, in what format, and to what tolerances — so that each platform can interpret and act on inputs from the other reliably and safely.
OEM-agnostic, “open” autonomy systems provide a critical foundation here. Designed to integrate across different truck platforms without dependence on proprietary ecosystems, they enable mines to:
Maintain consistent communication protocols across mixed AHS environments
Retain existing fleet investments while introducing new autonomous capability
Introduce autonomy incrementally rather than through full fleet replacement
Technologies such as drive-by-wire retrofitting play a critical role here, allowing autonomous capability to be added to existing vehicles without fundamentally altering their underlying architecture. This open approach lowers the barrier to adoption and supports genuine interoperability, allowing operators to scale autonomy at their own pace while preserving capital investment.
Integrated Orchestration and Fleet-Level Intelligence
Effective traffic management in mixed-fleet environments requires more than individual vehicle capability. Autonomy must extend to fleet-wide orchestration, enabling coordinated decision-making across the entire haulage network.
In mixed-fleet environments, inefficiencies often emerge at points of interaction such as intersections, loading zones, and dump areas, where uncoordinated movements can lead to delays, queuing, and underutilisation of equipment.
Integrated autonomy platforms link vehicle behaviour, dispatch, and traffic management into a unified system. This enables real-time coordination of task allocation, routing, and right-of-way decisions, allowing mixed fleets to operate with a shared understanding of priorities, routes, and constraints, even in highly congested environments.
The result is a more synchronised haulage network, where vehicle movements are optimised not just individually, but across the entire system. This reduces bottlenecks at key interaction points, improves cycle efficiency, and ensures that vehicles can operate together more predictably and efficiently.
AI-Powered Perception and Behaviour Prediction
Safe and productive coordination with manual trucks requires that autonomous vehicles go beyond simply detecting human-operated vehicles — they must anticipate their behaviour.
Advanced autonomy systems are increasingly built on AI-powered 360º perception, combining real-time environmental awareness with onboard decision-making to continuously interpret, predict, and respond to complex interactions. This shift toward vehicle-level intelligence reduces reliance on central control and enables faster, more adaptive responses in dynamic mining environments.
Several autonomy providers are investing in behaviour prediction capabilities designed to distinguish between different driving patterns and define probable movement boundaries for surrounding vehicles.
This approach allows autonomous trucks to:
Anticipate potential actions of human drivers
Reduce abrupt or unnecessary manoeuvres
Maintain smoother, more consistent interactions in shared environments
The importance of this capability has been recognised beyond mining, gaining traction in broader autonomous driving research, including datasets and challenges such as Argoverse that focus on motion forecasting in complex environments.
Real-World Validation in Complex Environments
Mixed-fleet autonomy is beginning to be validated in real operational environments where variability, unpredictability, and high interaction density are unavoidable.
Across the industry, deployments by autonomy providers such as EACON Mining Technology, Komatsu, Caterpillar, Epiroc, and Pronto demonstrate that autonomy is no longer confined to controlled pilot zones or greenfield projects. In selected brownfield sites, autonomous systems are now interacting with legacy fleets, existing infrastructure, and human-operated equipment as part of day-to-day production.
These deployments show that the true test of autonomy lies not in isolation, but in its ability to function reliably within complex, shared environments.
Key examples of this approach can be found in deployments across China where large fleets of autonomous trucks, including hybrid and battery-electric models, operate alongside manned vehicles across shared haul roads, loading zones, and dump areas. These are active production environments with continuous interaction, reflecting the conditions most mines face when introducing autonomy into existing operations.
Operational Outcomes
When fleet-wide orchestration and perception work together, the effects show up at the points of interaction (intersections, loading zones, dumps) where uncoordinated movements have historically caused delays. At one EACON deployment in northwest China, a mixed-fleet operation recorded a 20% reduction in time spent navigating a high-traffic intersection, along with measurable reductions in heavy, medium, and light braking per kilometre travelled.
At one mixed-fleet operation in northwest China, this approach was reflected in a 20% reduction in time spent navigating a high-traffic intersection, along with measurable reductions in heavy, medium, and light braking per kilometre travelled.
A Future Built in Complexity
The future of autonomous haulage will not be defined solely by fully autonomous greenfield operations. Instead, it will be shaped by the industry’s ability to deploy autonomy in existing mines, with mixed fleets, active production, and real-world complexity.
Industry collaborations highlight the growing importance of flexibility in both retrofit and factory-fit autonomy. Supporting diesel, hybrid-electric, and battery-electric truck platforms reflects a broader industry shift toward adaptable deployment models.
Success in this context requires more than technology. It demands systems that can ensure interoperability across platforms, manage traffic intelligently in complex shared environments, and coordinate safely alongside human drivers. The companies that succeed in this environment will be those that can combine advanced AI, flexible system design, and real-world operational experience to deliver autonomy that works within complexity, not outside it.
Mixed fleets are not a temporary challenge to overcome; they are the proving ground for scalable autonomy.


